Robot Kinematics
Robotics Technology
Robotics (Intro video)
IEEE RAS
A real scenario: Underwater Robotics
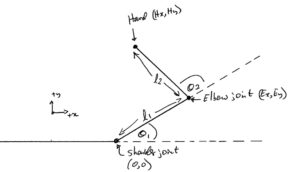
Kinematics is the relationships between the positions, velocities, and accelerations of the links of a manipulator, where a manipulator is an arm, finger, or leg. In this chapter, we will develop a mathematical framework for describing these relationships, in particular position.
In the kinematic analysis of manipulator position, there are two separate problems to solve: direct kinematics, and inverse kinematics. Direct kinematics involves solving the forward transformation equation to find the location of the hand in terms of the angles and displacements between the links.
Introduction to Robotics John J. Craig 2013
Robot Kinematics Simulator
MatLab Simulink Toolbox Software for robotics and vision system
www.petercorke.com/Home.html Prof.Peter Corke (The University of Queensland – Australia)
3D model based software, Prof. S.K. Saha (Dep.of Mechanical Eng, Indian Institute Of Technology Delhi IITDelhi)
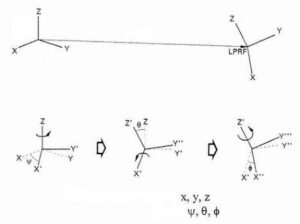

RPY angle sets
Euler angles